MEMS Devices
Micro Electro-Mechanical System (MEMS) devices are designed and manufactured based upon physical laws in micro-scale.
Micro mechanical sensors, actuators and micro electronic circuits are generally considered as MEMS devices. Micro mechanical sensors and actuators are
the basic devices for MEMS and many other MEMS devices are manufactured using the design principles of MEMS sensor and actuators. These devices are
extensively used in Bio-medical, Industrial, and commercial applications. Some of the MEMS devices
designed by MEMSTech Pakistan includes,
MEMS Gyroscopes
MEMS vibratory gyroscopes are the devices that are
used to sense angular motion of a body. The main sensing mechanism is based on the Coriolis
effect produced due to the combination of angular rotation and the vibration of a sensing mass.
Therefore, MEMS vibratory gyroscopes are also termed as “Coriolis Vibratory Gyroscopes” (CVG).
MEMS based gyroscopes have primary excitation and secondary detection with single or multiple
Degree of freedom (DOF). The proof (sensing) mass or multiple masses are connected to beams
and motion of beams is either translational or rotational. A simple MEMS gyroscope is
shown below in figure.
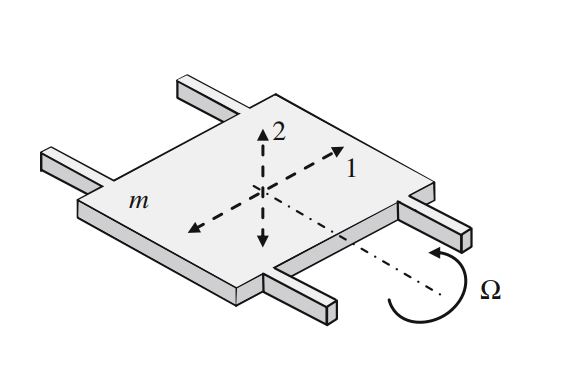
As shown in figure, the mass is vibrated using any external source in direction 1. When the structure experience rotation
around axis orthognol to direction-1, the mass will be forced to move in direction-2.
MEMS Accelerometer.
Micro-Electro-Mechanical Systems (MEMS) based accelerometers have high growing market potential due to low
cost, low power, and numerous applications in the field of biomedical, automotive, inertial navigation, structural health
monitoring and consumer electronics . In inertial navigation systems, they are used alongside gyroscope and
magnetometer to form an Inertial Measurement Unit (IMU), which is used to measure the position and motion of body in
space. The integration of these three sensors for inertial navigation in various applications has increased their market
demand . The main performance specifications for MEMS accelerometers include high sensitivity, high bandwidth, high
linearity, good bias stability, low noise and reliability .
The transduction mechanisms for the conversion of input acceleration to a suitable electronic signal can be either
capacitive, piezo resistive, optical, thermal and piezo electric. The accelerometers based on capacitive transduction
mechanisms have shown good experimental performance in literature in terms of sensitivity, dc response, size, noise, and
thermal stability . Moreover, they can be easily integrated with the interface readout electronics used for signal
conditioning Many capacitive MEMS accelerometer designs have been reported in literature , which differ in their
size, bandwidth, sensitivity, noise, input acceleration range and choice of material used for the microfabrication. The
major challenge in the design of capacitive MEMS accelerometers is to obtain target specifications for a given
application while considering the process constraints of microfabrication process. In addition to this, high capacitance
sensitivity i.e., capacitance change per unit input acceleration should be high so that the capacitance change is within the
minimum detectable input range of commercially available capacitance to voltage electronics. These challenges raise the
need for a MEMS accelerometer design that not only follow the microfabrication process constraints but also has good
output response in terms of sensitivity and low noise.
Micro-Grippers
Microgrippers are MEMS devices which are generally used for the manipulation of micro-objects including
micromechanical parts for microassembly and biological materials
for pick and place as well as for their deformability analysis. Different techniques for the manipulation of biological materials at micro and nano scale have been
implemented in literature including scanning probe microscopy , optical tweezers , laser tweezers , magnetic fields and MEMS
based microgrippers. The small size of microgrippers make them an ideal tool for the cell analysis which requires transfer, isolation,
injection and mechanical characterization of single cells for different biomedical applications.
The biological materials are generally fragile and soft, heatsensitive, subject to contamination and in some cases may
even be alive. These factors make design of a microgripper for biological materials a complex system, the working of
which is dependent on the actuation method, selection of material and microfabrication process, and most importantly on the kinematic behavior of microgripper. The
actuation methods for microgrippers are generally based on electrostatic , electrothermal , piezoelectric .
and shape memory alloy (SMA) effects . In comparison to other actuation methods, the electrothermal
actuators allow to achieve large displacements at relatively low actuation voltages. The working of electrothermal
actuators is based on the principle of thermal expansion and these actuators are fabricated either using single
material or two different materials in the bimorph structure. These actuators are generally designed in either U, V or Z
shaped configuration to achieve large output force. Among these configurations, the V and Z shaped electrothermal actuators allow to achieve pure translational and linear
motion.
The microgrippers are generally fabricated using silicon, metals or polymer materials. The use of silicon and metals for electrothermal microgrippers
require very high operating temperature (due to low coefficient of thermal expansion of these materials) and large
actuation forces due to high stiffness values. The high temperature at microgripper jaws may damage the biological materials. The polymer materials have low stiffness
and thus low handling force and exhibit good biocompatibility.
RF MEMS Switches
RF-MEMS technology enables design and fabrication of miniature, high performance components and networks like inductors , varactors ,
ohmic/capacitive switches, resonators , filters ,and antennas , that are being integrated with various commercial and military wireless communication,
satellite and radar systems. In the last two decades, RF-MEMS switches has been studied as an alternative to traditional semiconductor switches like Positive Intrinsic Negative
(PIN) diodes and Field Effect Transistor (FET) due to their small size, high quality factor, high isolation, low insertion loss and low cost .
These switches, with their bandwidth ranging from radio to millimeter wave frequency and operating in either shunt or series configurations,
are actuated by different mechanisms including electrostatic , electrothermal , piezoelectric , and magneto static .
The RF-MEMS capacitive contact switches, with electrostatic actuation, are
most commonly used due to their compatibility with fabrication processes, simple adjustment with transmission lines and negligible power consumption . However, long term reliability still remains a matter
of concern in the commercial utilization of RF-MEMS switches . The reliability of RF-MEMS switches is hindered by several mechanical
and electrical phenomena like fatigue , creep , residual stresses , stiction and dielectric charging . Among all these reliability
issues, the presence of surface roughness is a major problem which leads to dielectric charging and contact degradation of RF-MEMS
switches . The surface roughness in RF-MEMS switches is mainly caused by materials, chemical etching and variations in fabrication
processes . It can affect the performance of RF-MEMS switches leading to stiction , heating and adhesion . The rough
morphology of interfaces and contacts has an adverse effect on electric field of parallel plate capacitors , capacitance and leakage currents
of dielectric materials , isolation , frequency response and contact behavior of micro switches , dielectric charging and
breakdown of triple layer films , leakage currents in metal oxide semiconductor devices , and conductivity of metallic films.